❖본 조사 보고서의 견적의뢰 / 샘플 / 구입 / 질문 폼❖
센서 퓨전 시장 개요 (2025-2030)
센서 퓨전 시장은 자율 시스템의 신뢰성 높은 실시간 인지 필요성, 강화된 안전 규제, 그리고 솔리드 스테이트 LiDAR와 같은 핵심 하드웨어 비용 하락에 힘입어 2026년부터 2030년까지 연평균 15.80%의 높은 성장률을 기록할 것으로 전망됩니다. 아시아 태평양 지역이 자율주행차 테스트 및 산업 자동화 프로젝트의 활발한 전개로 시장을 선도하고 있으며, 유럽의 안전 정책과 미국의 V2X 인프라 투자 또한 시장 성장에 기여하고 있습니다.
시장 규모 및 예측
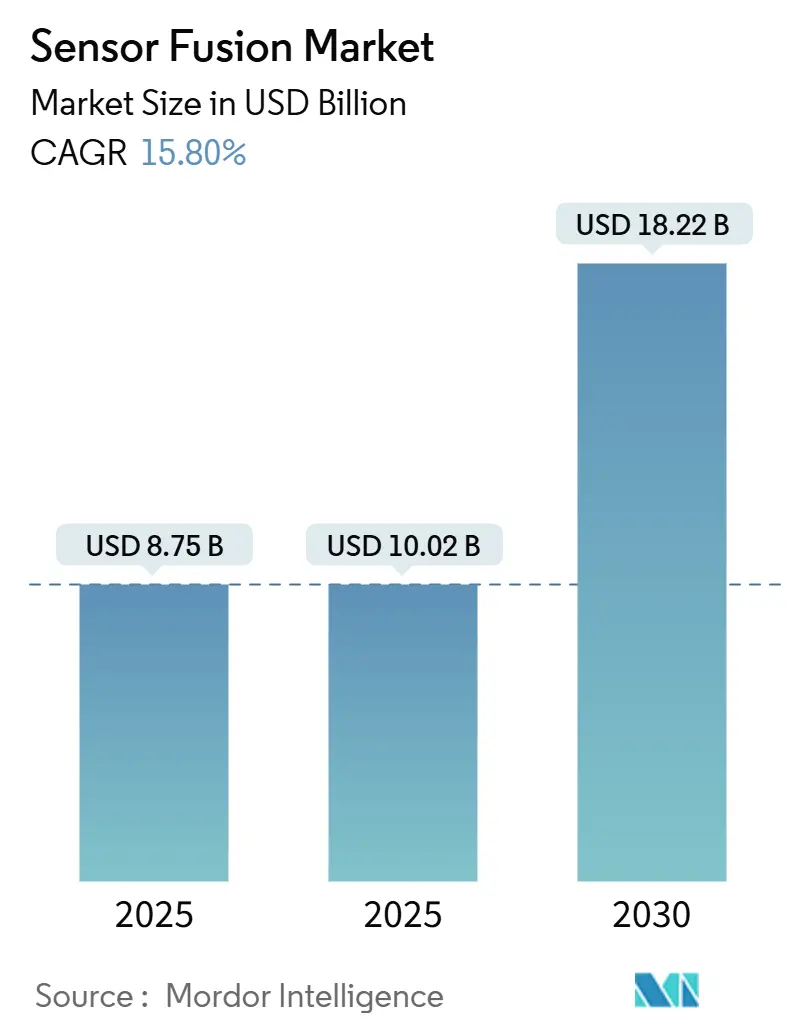
Mordor Intelligence의 분석에 따르면, 센서 퓨전 시장 규모는 2025년 87억 5천만 달러에서 2026년 100억 2천만 달러로 성장했으며, 2030년에는 182억 2천만 달러에 이를 것으로 예상됩니다. 이는 예측 기간(2026-2030) 동안 15.80%의 견고한 연평균 성장률(CAGR)을 의미합니다. 아시아 태평양 지역은 가장 빠르게 성장하는 동시에 가장 큰 시장으로 자리매김하고 있으며, 시장 집중도는 중간 수준입니다.
주요 성장 동인
센서 퓨전 시장의 성장을 견인하는 주요 동인들은 다음과 같습니다.
* Euro NCAP 5성 등급을 위한 센서 퓨전 의무화: 유럽 신차 평가 프로그램(Euro NCAP)의 2025년 로드맵은 다중 센서 인지를 유럽 자동차 제조업체에게 필수적인 안전 기준으로 제시하고 있습니다. 이는 카메라, 레이더, 그리고 점차 LiDAR를 통합하여 주야간 보행자 감지 테스트를 통과해야 함을 의미합니다. 미국 NHTSA의 정책 또한 이러한 글로벌 추세를 강화하여 공급업체들이 여러 지역에 걸쳐 개발 비용을 상각할 수 있도록 합니다. 이러한 규제적 압력은 하드웨어 재설계 없이 알고리즘 업그레이드를 통해 안전성 향상을 달성할 수 있게 함으로써 소프트웨어 혁신을 가속화합니다.
* 솔리드 스테이트 LiDAR 비용 하락: 자동차 등급 솔리드 스테이트 LiDAR의 단위 가격이 초기 상용화 수준 대비 약 99.5% 하락하면서, 중국의 중급 시장에서 3개 센서 퓨전 스위트(LiDAR 포함)의 도입이 가능해졌습니다. 2025년에는 전년 대비 두 배 증가한 94개 국내 차량 모델에 LiDAR가 탑재될 예정입니다. 중국 정부의 2025년 4월 L3 자율주행 프레임워크는 차량 호출 및 개인 사용 프로그램을 통해 더 높은 자율성을 수익화할 수 있도록 하여 수요를 더욱 촉진하고 있습니다.
* 엣지 AI 칩 발전: SoC(System-on-Chip) 내 NPU(신경망 처리 장치) 내장은 추론 지연 시간을 단축시켜 다중 모달 퓨전 워크로드를 온디바이스에서 처리할 수 있게 합니다. NVIDIA의 Thor 칩은 통합된 콕핏-ADAS 컴퓨팅을 위해 2,000 TOPS의 성능을 제공합니다. TDK의 9축 PositionSense™는 IMU와 TMR 센서를 결합하여 웨어러블 기기의 작동 시간을 연장하고 방향 정확도를 향상시킵니다. 이는 클라우드 연결 없이 XR 헤드셋, 상황 인식 스마트폰 등 공간 컴퓨팅 활용 사례를 가능하게 합니다.
* 스마트 팩토리 내 AMR 로봇 배치 증가: 노동력 부족과 생산성 향상에 대한 요구는 2028년까지 전 세계 AMR(자율 이동 로봇) 시장이 연평균 18.3% 성장할 것으로 예상하게 합니다. 공장 로봇은 사람과 기계 사이에서 안전하게 이동하기 위해 LiDAR, 카메라, 레이더, 초음파 센서 퓨전에 의존합니다. Nokia의 MX Context는 센서 퓨전과 산업용 엣지 AI를 결합하여 작업 현장에서 사고 감지 속도를 높입니다.
* 국방 현대화 프로그램: 중동 지역의 국방 현대화 프로그램은 다중 센서 타겟팅 및 내비게이션 시스템에 자금을 지원하고 있으며, 이러한 프로젝트는 종종 민간 자율주행차로 이전될 수 있는 이중 용도 IP를 생성합니다.
* V2X 데이터 스트림 통합: 미국의 V2X(Vehicle-to-Everything) 데이터 스트림을 퓨전 스택에 통합하는 것은 L4 자율주행의 잠재력을 해제하는 데 필수적입니다. 이는 북미 지역에서 점진적으로 유럽과 아시아로 확산될 것으로 예상됩니다.
시장 제약 요인
시장 성장을 저해하는 주요 제약 요인들은 다음과 같습니다.
* 통일된 퓨전 아키텍처 표준 부재: 공통 데이터 형식 및 검증 프레임워크의 부재는 OEM 및 공급업체가 맞춤형 퓨전 파이프라인을 설계하게 하여 통합 비용을 증가시키고 부품 호환성을 저해합니다. NIST는 공급업체 간 호환성을 가속화하기 위해 표준화된 참조 데이터 세트 및 평가 지표를 요구하고 있습니다.
* 높은 컴퓨팅 오버헤드: 비자동차 IoT 기기의 경우 높은 컴퓨팅 오버헤드가 BoM(자재 명세서)을 증가시킵니다.
* 신흥 시장의 제한적인 LiDAR 보급률: 남미, 아프리카, 동남아시아 일부 지역에서는 LiDAR 보급률이 낮아 다중 모달 퓨전 채택이 제한됩니다.
* 클라우드 기반 센서 퓨전 파이프라인 관련 데이터 프라이버시 및 사이버 보안 우려: GDPR 및 유사 규정은 자율주행차 인지 시스템이 수집하는 개인 식별 정보의 차량 외부 이동을 제한합니다. 고대역폭 LiDAR 포인트 클라우드를 암호화하고 익명화하는 것은 컴퓨팅 예산을 증가시켜 자동차 제조업체들이 원시 데이터를 차량 내부에 유지하기 위해 엣지 중심 퓨전을 선호하게 만듭니다.
부문별 분석
* 제공 방식 (Offering): 2024년 하드웨어 시장 규모는 57억 달러로 전체 지출의 65%를 차지하며, 카메라, 레이더, LiDAR, IMU의 필수적인 역할을 강조합니다. 차량당 센서 수가 30개를 초과하면서 하드웨어 성장은 지속되지만, 가격 하락이 매출 확장을 억제합니다. 반면 소프트웨어 부문은 OTA(Over-The-Air) 업데이트를 통해 판매 후 새로운 수익 단계를 창출하며 2030년까지 18.9%의 CAGR로 빠르게 성장할 것으로 예상됩니다.
* 융합 방식 (Fusion Method): 2024년 레이더-카메라 시스템은 센서 퓨전 시장 점유율의 38%를 차지하며, 비용 효율성과 악천후에 대한 견고성을 균형 있게 제공합니다. 대부분의 L2 ADAS 스택은 적응형 크루즈 컨트롤 및 자동 제동을 위해 이 조합에 의존합니다. 그러나 솔리드 스테이트 LiDAR 가격 하락으로 인해 3개 센서 플랫폼(카메라 + 레이더 + LiDAR) 시장은 2030년까지 22.5%의 CAGR로 급증할 것으로 예상됩니다.
* 알고리즘 유형 (Algorithm Type): 칼만 필터는 결정론적 동작과 인증 가능성 덕분에 2024년 배포에서 52%의 시장 점유율을 차지하며 선두를 달렸습니다. 엣지 컴퓨팅 파워가 급증함에 따라 신경망 관련 센서 퓨전 시장 규모는 24.8%의 CAGR로 빠르게 증가하고 있습니다. 하이브리드 스택은 순수 데이터 기반 네트워크가 오해할 수 있는 예외 상황에 대비할 수 있어 안전에 중요한 맥락에서 선호되고 있습니다.
* 적용 분야 (Application): ADAS(첨단 운전자 보조 시스템)는 유럽, 미국, 중국에서 AEB(자동 비상 제동) 및 차선 유지와 같은 기능이 신차에 보편적으로 적용되면서 2024년 매출의 55%를 차지했습니다. 그러나 자율주행(L3-L5)은 베이징, 뮌헨, 캘리포니아에서 구체적인 규제 경로가 나타나면서 22.1%의 CAGR로 가장 빠르게 성장하고 있습니다. 자동차 외에도 XR 헤드셋, 스마트폰, 웨어러블 기기에서 공간 컴퓨팅을 위해 다중 센서 어레이를 통합하고 있습니다.
* 차량 유형 (Vehicle Type): 승용차는 전 세계 연간 차량 생산량의 대부분을 차지하므로 2024년 수요의 48%를 차지했습니다. Euro NCAP의 센서 퓨전 의무화는 이러한 추세를 더욱 공고히 합니다. 한편, 물류 체인이 디지털화되고 노동력 격차가 확대됨에 따라 셔틀 및 AGV(자율 주행 운반 로봇)는 2030년까지 20.4%의 CAGR을 기록할 것으로 예상됩니다.
지역별 분석
아시아 태평양 지역은 2024년 33억 달러 규모로 센서 퓨전 시장에서 가장 큰 비중을 차지하며 17.2%의 CAGR로 성장하고 있습니다. 중국의 50개 이상의 자율주행차 테스트 구역과 산업용 로봇에 대한 국가 보조금이 시장 규모를 확대하고 있습니다. 일본과 한국은 글로벌 공급망에 기여하는 소형 센서 노하우를 제공합니다. 북미 시장은 실리콘 밸리의 풍부한 AI 인재 풀과 L4 인지 중복성을 위한 V2X 무선 통신 인프라 구축 노력에 힘입어 성장하고 있습니다. 유럽은 엄격한 안전 및 데이터 프라이버시 규정에 따라 시장 방향이 설정됩니다. 중동 지역에서는 국방 현대화가 다중 센서 타겟팅 시스템을 촉진하며, 이는 종종 민간 자율주행차로 이전되는 이중 용도 IP를 생성합니다. 아프리카와 남미는 제한적인 LiDAR 보급률과 덜 성숙한 데이터 인프라로 인해 뒤처지고 있지만, 스마트 시티 자금 지원을 통해 교통 관리 및 공공 안전 드론을 위한 센서 퓨전 파일럿 프로젝트가 진행되고 있습니다.
경쟁 환경
센서 퓨전 시장은 글로벌 Tier-1 공급업체와 반도체 대기업을 중심으로 중간 정도의 집중도를 보입니다. Bosch, Continental, Aptiv, NXP, Infineon은 하드웨어 및 도메인 컨트롤러 로직의 상당 부분을 공급하며, NVIDIA와 Qualcomm은 자동차 등급 AI 가속기를 제공합니다. Bosch, TSMC, Infineon, NXP는 미래 센서 및 프로세서 제품군의 노드 가용성을 확보하기 위해 드레스덴 팹에 공동 투자하는 등 수직 통합 추세가 나타나고 있습니다. 소프트웨어 중심의 경쟁업체들은 실리콘보다는 알고리즘 IP에 중점을 둡니다. Mobileye와 Aurora는 각각 카메라 중심 또는 LiDAR 중심 아키텍처에 최적화된 인지 스택을 개발합니다. LiDAR 신규 업체인 Hesai와 RoboSense는 공격적인 가격 책정과 빠른 반복을 통해 시장 점유율을 확보하고 있으며, 중국 OEM 프로그램에 3천만 대 이상의 제품을 공급했습니다. 이는 기존 광학 센서 업체들이 비용 절감 로드맵을 가속화하도록 압박하고 있습니다. 모듈형, 표준 기반 미들웨어는 차량 등급 및 산업용 로봇 전반에 걸쳐 통합 시간을 단축하는 데 있어 미개척 기회를 제공합니다.
최근 산업 동향
* 2025년 5월: Nokia는 GNSS, RFID, AI를 결합하여 실시간 상황 인식을 제공하는 산업용 엣지 센서 퓨전 플랫폼인 MX Context를 출시했습니다.
* 2025년 4월: Kyocera는 시차 없는 출력과 장거리 장애물 감지를 위한 고밀도 레이저 스캐닝 기능을 갖춘 세계 최초의 카메라-LiDAR 퓨전 센서를 공개했습니다.
* 2025년 3월: General Atomics와 UC San Diego는 AI 기반 퓨전 에너지 시스템 설계를 가속화하기 위해 퓨전 데이터 과학 및 디지털 엔지니어링 센터를 개설했습니다.
* 2025년 1월: TDK는 모바일 모션 트래킹 애플리케이션에서 드리프트 및 전력 소모를 줄이는 9축 PositionSense™ IMU + TMR 솔루션을 출시했습니다.
센서 퓨전 시장 보고서 요약
본 보고서는 센서 퓨전 시장에 대한 포괄적인 분석을 제공합니다. 센서 퓨전은 하드웨어와 임베디드 소프트웨어 유닛이 카메라, 레이더, LiDAR, 초음파, 관성 모듈 등 최소 두 개 이상의 이종 센서 데이터를 결합하여 ADAS(첨단 운전자 지원 시스템) 및 고수준 자율 이동성을 위한 통합 인지 출력을 제공하는 기술을 의미합니다. 2025년 시장 규모는 87.5억 달러로 평가되며, 2026년 100.2억 달러에서 2030년 182.2억 달러에 이를 것으로 전망되며, 예측 기간(2026-2030년) 동안 연평균 성장률(CAGR) 15.80%를 기록할 것으로 예상됩니다. 단일 센서 모듈 및 클라우드 전용 분석 스위트는 본 연구 범위에서 제외됩니다.
시장 동인:
센서 퓨전 시장의 성장을 가속화하는 주요 요인으로는 ▲Euro NCAP 5성 등급 획득을 위한 센서 퓨전 의무화로 인한 유럽 OEM의 채택 증가 ▲고체 LiDAR 비용 하락으로 중국 중급 차량에 멀티 센서 스위트 적용 확대 ▲엣지 AI 칩 발전으로 모바일 및 XR 기기에서 실시간 멀티모달 퓨전 가능 ▲스마트 팩토리 내 AMR(자율 이동 로봇) 배치 증가에 따른 고정밀 센서 퓨전 수요 증대 ▲중동 지역 국방 현대화 프로그램의 멀티 센서 타겟팅 및 내비게이션 시스템 투자 ▲미국에서 L4 자율주행 활성화를 위한 V2X 데이터 스트림의 퓨전 스택 통합 등이 있습니다.
시장 제약:
반면, 시장 성장을 저해하는 요인으로는 ▲통일된 퓨전 아키텍처 표준 부족으로 인한 상호 운용성 문제 ▲비자동차 IoT 기기의 높은 컴퓨팅 오버헤드로 인한 BoM(자재 명세서) 증가 ▲신흥 시장에서의 LiDAR 보급 제한으로 인한 멀티모달 퓨전 채택 지연 ▲클라우드 지원 센서 퓨전 파이프라인과 관련된 데이터 프라이버시 및 사이버 보안 우려 등이 있습니다.
주요 시장 동향 및 적용 분야:
주요 시장 동향으로는 엣지 AI 통합 및 SoC(시스템 온 칩) 발전, 그리고 관련 특허 및 연구 활동이 활발히 진행되고 있습니다. 적용 분야는 ADAS(ACC, AEB, ESC, FCW, LKA 포함), 레벨 3-5 자율주행, AR/VR 기기, 스마트폰, 웨어러블 등 가전제품, 로봇 및 드론, 산업 자동화 및 스마트 제조, 국방 및 항공우주 등으로 광범위합니다. 특히, 카메라, 레이더, LiDAR를 결합한 3-센서 퓨전 스위트는 LiDAR 비용이 크게 하락함에 따라 레벨 3-5 자율주행에 필수적인 높은 깊이 정확도와 이중화를 제공하며 채택이 증가하고 있습니다. 또한, OTA(Over-The-Air) 업데이트 및 AI 기반 퓨전 알고리즘을 통해 설치된 센서에 새로운 기능을 추가하여 하드웨어 교체 없이 지속적인 성능 업그레이드를 통해 소프트웨어 매출이 하드웨어보다 빠르게 성장하고 있습니다. 자동차 외 산업에서는 스마트 팩토리의 AMR 로봇이 고정밀 퓨전 기술을 채택하며 2028년까지 18.3%의 CAGR로 성장할 것으로 예상됩니다.
시장 세분화:
시장은 제공 방식(하드웨어, 소프트웨어), 퓨전 방식(레이더+카메라, LiDAR+카메라, 레이더+LiDAR, IMU+GPS, 3-센서 퓨전), 알고리즘 유형(칼만 필터, 베이지안 네트워크, 신경망/딥러닝, GNSS/INS 통합), 적용 분야(ADAS, 자율주행, 가전, 로봇/드론, 산업 자동화, 국방/항공우주), 차량 유형(승용차, 경상용차, 중상용차, 기타 자율주행차), 그리고 지역(북미, 유럽, 아시아 태평양, 남미, 중동, 아프리카)별로 세분화되어 분석됩니다.
경쟁 환경 및 지역 분석:
경쟁 환경 섹션에서는 시장 집중도, 주요 기업들의 전략적 움직임, 시장 점유율 분석 및 Robert Bosch, Continental, NXP Semiconductors, Nvidia, Qualcomm, Mobileye 등 주요 22개 기업의 프로필을 다룹니다. 지역별로는 아시아 태평양 지역이 중국의 대규모 자율주행 파일럿 및 적극적인 산업 자동화 투자에 힘입어 38%의 매출 점유율로 시장을 선도하고 있습니다.
연구 방법론 및 신뢰성:
본 보고서는 UNECE 규정, Euro NCAP 테스트 결과, 세계은행 데이터 등 권위 있는 2차 자료와 ADAS 공급업체, 인지 스택 소프트웨어 리더, 자동차 반도체 전략가 등과의 1차 인터뷰를 통해 데이터를 수집하고 검증합니다. 시장 규모는 상향식 및 하향식 접근 방식을 통해 산정되며, 다변량 회귀 기반 예측 모델과 몬테카를로 시뮬레이션을 활용하여 신뢰성을 높였습니다. Mordor Intelligence는 투명한 변수, 다중 소스 교차 검증, 연간 업데이트를 통해 시장 예측의 신뢰성을 확보하고 있습니다.
시장 기회 및 미래 전망:
보고서는 또한 시장 내 미개척 영역(White-Space)과 미충족 수요를 평가하여 미래 시장 기회에 대한 통찰력을 제공합니다.

1. 서론
- 1.1 연구 가정 및 시장 정의
- 1.2 연구 범위
2. 연구 방법론
3. 요약
4. 시장 환경
- 4.1 시장 개요
- 4.2 시장 동인
- 4.2.1 Euro NCAP 5성 등급을 위한 센서 융합 의무화로 유럽 OEM 채택 가속화
- 4.2.2 고체 LiDAR 비용 하락으로 중국 중급 차량에 다중 센서 스위트 도입 가능
- 4.2.3 엣지 AI 칩 발전으로 모바일 및 XR 기기에서 실시간 다중 모달 융합 가능
- 4.2.4 스마트 팩토리 내 AMR 로봇 배포로 고정밀 센서 융합 요구 증가
- 4.2.5 중동 국방 현대화 프로그램, 다중 센서 표적 및 내비게이션 시스템에 자금 지원
- 4.2.6 V2X 데이터 스트림을 융합 스택에 통합하여 미국에서 L4 자율 주행 실현
- 4.3 시장 제약
- 4.3.1 통일된 융합 아키텍처 표준 부족으로 상호 운용성 저해
- 4.3.2 높은 계산 오버헤드로 비자동차 IoT 기기의 BoM 증가
- 4.3.3 신흥 시장의 제한적인 LiDAR 보급률로 다중 모달 융합 채택 제한
- 4.3.4 클라우드 지원 센서 융합 파이프라인 관련 데이터 프라이버시 및 사이버 보안 문제
- 4.4 가치 / 공급망 분석
- 4.5 규제 또는 기술 전망
- 4.5.1 다중 센서 융합 플랫폼 기술 발전 로드맵
- 4.5.2 엣지 AI 통합 및 SoC 발전
- 4.6 포터의 5가지 경쟁 요인 분석
- 4.6.1 공급업체의 교섭력
- 4.6.2 구매자/소비자의 교섭력
- 4.6.3 신규 진입자의 위협
- 4.6.4 대체 제품의 위협
- 4.6.5 경쟁 강도
- 4.7 주요 시장 동향
- 4.7.1 주요 특허 및 연구 활동
- 4.7.2 주요 및 신흥 애플리케이션
- 4.7.2.1 적응형 순항 제어 (ACC)
- 4.7.2.2 자동 비상 제동 (AEB)
- 4.7.2.3 전자식 자세 제어 (ESC)
- 4.7.2.4 전방 충돌 경고 (FCW)
- 4.7.2.5 기타 신흥 애플리케이션
- 4.8 투자 환경
5. 시장 규모 및 성장 예측 (가치)
- 5.1 제공 방식별
- 5.1.1 하드웨어
- 5.1.2 소프트웨어
- 5.2 융합 방식별
- 5.2.1 레이더 + 카메라 융합
- 5.2.2 라이다 + 카메라 융합
- 5.2.3 레이더 + 라이다 융합
- 5.2.4 IMU + GPS 융합
- 5.2.5 3-센서 융합 (카메라 + 레이더 + 라이다)
- 5.3 알고리즘 유형별
- 5.3.1 칼만 필터 (EKF, UKF)
- 5.3.2 베이지안 네트워크
- 5.3.3 신경망 / 딥러닝
- 5.3.4 GNSS/INS 통합
- 5.4 애플리케이션별
- 5.4.1 첨단 운전자 지원 시스템 (ADAS)
- 5.4.1.1 ACC
- 5.4.1.2 AEB
- 5.4.1.3 ESC
- 5.4.1.4 FCW
- 5.4.1.5 차선 유지 보조 (LKA)
- 5.4.2 자율 주행 (레벨 3-5)
- 5.4.3 가전제품 (AR/VR, 스마트폰, 웨어러블)
- 5.4.4 로봇 및 드론
- 5.4.5 산업 자동화 및 스마트 제조
- 5.4.6 국방 및 항공우주
- 5.5 차량 유형별
- 5.5.1 승용차
- 5.5.2 경량 상용차
- 5.5.3 대형 상용차
- 5.5.4 기타 자율 주행 차량 (셔틀, AGV)
- 5.6 지역별
- 5.6.1 북미
- 5.6.1.1 미국
- 5.6.1.2 캐나다
- 5.6.1.3 멕시코
- 5.6.1.4 카리브해
- 5.6.2 유럽
- 5.6.2.1 독일
- 5.6.2.2 영국
- 5.6.2.3 프랑스
- 5.6.2.4 이탈리아
- 5.6.2.5 스페인
- 5.6.2.6 유럽 기타 지역
- 5.6.3 아시아 태평양
- 5.6.3.1 중국
- 5.6.3.2 일본
- 5.6.3.3 대한민국
- 5.6.3.4 인도
- 5.6.3.5 아시아 태평양 기타 지역
- 5.6.4 남미
- 5.6.4.1 브라질
- 5.6.4.2 아르헨티나
- 5.6.4.3 남미 기타 지역
- 5.6.5 중동
- 5.6.5.1 사우디아라비아
- 5.6.5.2 아랍에미리트
- 5.6.5.3 이스라엘
- 5.6.5.4 튀르키예
- 5.6.5.5 중동 기타 지역
- 5.6.6 아프리카
- 5.6.6.1 남아프리카
- 5.6.6.2 나이지리아
- 5.6.6.3 이집트
- 5.6.6.4 아프리카 기타 지역
6. 경쟁 환경
- 6.1 시장 집중도
- 6.2 전략적 움직임
- 6.3 시장 점유율 분석
- 6.4 기업 프로필 (글로벌 개요, 시장 개요, 핵심 부문, 사용 가능한 재무 정보, 전략 정보, 주요 기업의 시장 순위/점유율, 제품 및 서비스, 최근 개발 포함)
- 6.4.1 Robert Bosch GmbH
- 6.4.2 Continental AG
- 6.4.3 NXP Semiconductors N.V.
- 6.4.4 STMicroelectronics N.V.
- 6.4.5 Infineon Technologies AG
- 6.4.6 Texas Instruments Inc.
- 6.4.7 Nvidia Corporation
- 6.4.8 Qualcomm Incorporated
- 6.4.9 Analog Devices Inc.
- 6.4.10 Mobileye Global Inc.
- 6.4.11 Aptiv PLC
- 6.4.12 Renesas Electronics Corporation
- 6.4.13 Valeo S.A.
- 6.4.14 ZF Friedrichshafen AG
- 6.4.15 Arbe Robotics Ltd.
- 6.4.16 BASELABS GmbH
- 6.4.17 LeddarTech Inc.
- 6.4.18 TDK Corporation
- 6.4.19 Kionix Inc. (ROHM)
- 6.4.20 Memsic Inc.
- 6.4.21 CEVA Inc.
- 6.4.22 AMD Xilinx
7. 시장 기회 및 미래 전망
❖본 조사 보고서에 관한 문의는 여기로 연락주세요.❖
센서 융합은 다수의 센서로부터 수집된 데이터를 통합하고 분석하여, 개별 센서로는 얻기 어려운 보다 정확하고 신뢰성 높은 정보를 생성하는 기술입니다. 이는 각 센서의 한계점(예: 노이즈, 제한된 시야, 특정 환경에서의 성능 저하)을 상호 보완하고, 중복된 정보를 활용하여 시스템의 전반적인 인지 능력을 향상시키는 것을 목표로 합니다. 궁극적으로 센서 융합은 환경이나 시스템의 상태에 대한 종합적이고 견고한 이해를 제공함으로써, 더욱 정교하고 안정적인 의사결정을 가능하게 합니다.
센서 융합은 데이터 처리 수준에 따라 크게 세 가지 유형으로 분류됩니다. 첫째, 데이터 레벨 융합은 각 센서에서 수집된 원시 데이터를 직접 통합하는 방식입니다. 이는 가장 많은 정보를 보존하지만, 처리해야 할 데이터 양이 많아 계산 복잡성이 높다는 특징이 있습니다. 둘째, 특징 레벨 융합은 각 센서 데이터에서 의미 있는 특징(예: 객체의 크기, 속도, 형태)을 추출한 후, 이 특징들을 통합하는 방식입니다. 원시 데이터보다 정보량이 줄어들지만, 계산 효율성이 높아지는 장점이 있습니다. 셋째, 결정 레벨 융합은 각 센서가 독립적으로 환경에 대한 결정을 내린 후, 이 결정들을 종합하여 최종 결론을 도출하는 방식입니다. 이는 가장 간단하고 계산 비용이 낮지만, 정보 손실이 가장 크다는 단점이 있습니다. 이 외에도 칼만 필터, 확장 칼만 필터, 파티클 필터와 같은 확률 기반 방법론과 베이즈 네트워크, 딥러닝과 같은 인공지능 기반 방법론이 센서 융합의 핵심 기술로 활용됩니다.
센서 융합 기술은 다양한 산업 분야에서 광범위하게 활용되고 있습니다. 가장 대표적인 분야는 자율주행 자동차 및 로봇입니다. 라이다, 레이더, 카메라, 초음파 센서, 관성 측정 장치(IMU), GPS 등 여러 센서의 데이터를 융합하여 주변 환경을 정확하게 인지하고, 객체를 탐지 및 추적하며, 정밀한 위치 추정 및 지도를 생성하는 데 필수적입니다. 또한, 사물 인터넷(IoT) 및 스마트 기기 분야에서는 웨어러블 기기, 스마트 홈 시스템 등에서 사용자의 활동을 인식하고, 상황을 인지하며, 건강 모니터링을 수행하는 데 센서 융합이 적용됩니다. 산업 자동화 분야에서는 로봇의 정밀 제어, 생산 라인의 품질 검사, 설비의 예지 보전 등에 활용되어 생산 효율성과 안전성을 높입니다. 의료 분야에서는 환자 모니터링, 수술 로봇, 재활 보조 기기 등에 적용되어 진단 정확도를 높이고 의료 서비스를 개선합니다. 국방 및 항공우주 분야에서는 정밀 유도, 감시, 정찰 시스템에 센서 융합이 핵심적인 역할을 합니다.
센서 융합의 발전을 뒷받침하는 관련 기술로는 고성능 센서 기술의 발전이 있습니다. 센서의 소형화, 저전력화, 고정밀화는 융합 시스템의 성능을 향상시킵니다. 또한, 방대한 센서 데이터를 효율적으로 처리하기 위한 신호 처리 기술, 빅데이터 분석 기술, 그리고 인공지능(AI) 및 머신러닝 기술이 중요합니다. 특히 딥러닝은 복잡한 센서 데이터에서 특징을 자동으로 추출하고 패턴을 인식하며, 고차원적인 의사결정을 내리는 데 강력한 도구로 활용됩니다. 실시간 처리를 위한 엣지 컴퓨팅 기술과 저지연 고대역폭 통신을 제공하는 5G/6G 통신 기술 또한 센서 융합 시스템의 성능을 극대화하는 데 기여합니다. 정밀한 위치 추정 및 환경 지도를 생성하는 동시적 위치 추정 및 지도 작성(SLAM) 기술도 센서 융합과 밀접하게 연관되어 있습니다.
센서 융합 시장은 4차 산업혁명과 디지털 전환의 가속화에 힘입어 빠르게 성장하고 있습니다. 자율주행, 로봇, IoT 기기 등 지능형 시스템에 대한 수요 증가와 함께, 센서 가격 하락 및 성능 향상이 시장 성장을 견인하고 있습니다. 특히, 시스템의 신뢰성과 안전성에 대한 요구가 높아지면서, 단일 센서의 한계를 극복하는 센서 융합 기술의 중요성이 더욱 부각되고 있습니다. 주요 시장 참여자로는 센서 제조업체, 자동차 및 로봇 제조사, AI 솔루션 제공업체 등이 있으며, 이들은 기술 개발 및 표준화 노력을 통해 시장 경쟁력을 강화하고 있습니다. 그러나 센서 데이터의 동기화, 계산 복잡성, 센서 간의 보정 문제, 그리고 데이터 보안 및 프라이버시 보호와 같은 과제들이 여전히 존재합니다.
미래 센서 융합 기술은 더욱 고도화되고 지능화될 것으로 전망됩니다. 인공지능, 특히 딥러닝 기술과의 결합은 센서 융합 시스템이 더욱 복잡하고 불확실한 환경에서도 스스로 학습하고 적응하며, 인간과 유사한 수준의 인지 능력을 발휘하도록 할 것입니다. 다양한 종류의 물리 센서뿐만 아니라, 상황 정보, 사용자 피드백, 클라우드 데이터 등 비물리적 정보까지 융합하는 다중 모달(Multi-modal) 융합 기술이 발전하여 더욱 포괄적인 환경 인식이 가능해질 것입니다. 이는 스마트 시티, 스마트 팩토리, 스마트 헬스케어 등 초연결 사회의 다양한 분야에서 지능형 자율 시스템의 핵심 기반 기술로 자리매김할 것입니다. 또한, 센서 융합 시스템의 신뢰성과 안전성을 보장하기 위한 표준화 노력과 함께, 데이터 윤리 및 보안 문제에 대한 심도 깊은 논의와 기술적 해결책 마련이 더욱 중요해질 것입니다.